Skip to content
Home
Services
Drone-based magnetic total field surveys
Drone-based vector magnetic surveys
Drone-based electromagnetic survey system
Ground surveys
EM inversion services
Structural interpretation of magnetic data
3D inversion of magnetic data
Prospectivity mapping
Why Radai?
Success stories
News
Contact us
About Radai
Our team
Home
Services
Drone-based magnetic total field surveys
Drone-based vector magnetic surveys
Drone-based electromagnetic survey system
Ground surveys
EM inversion services
Structural interpretation of magnetic data
3D inversion of magnetic data
Prospectivity mapping
Why Radai?
Success stories
News
Contact us
About Radai
Our team
Linkedin
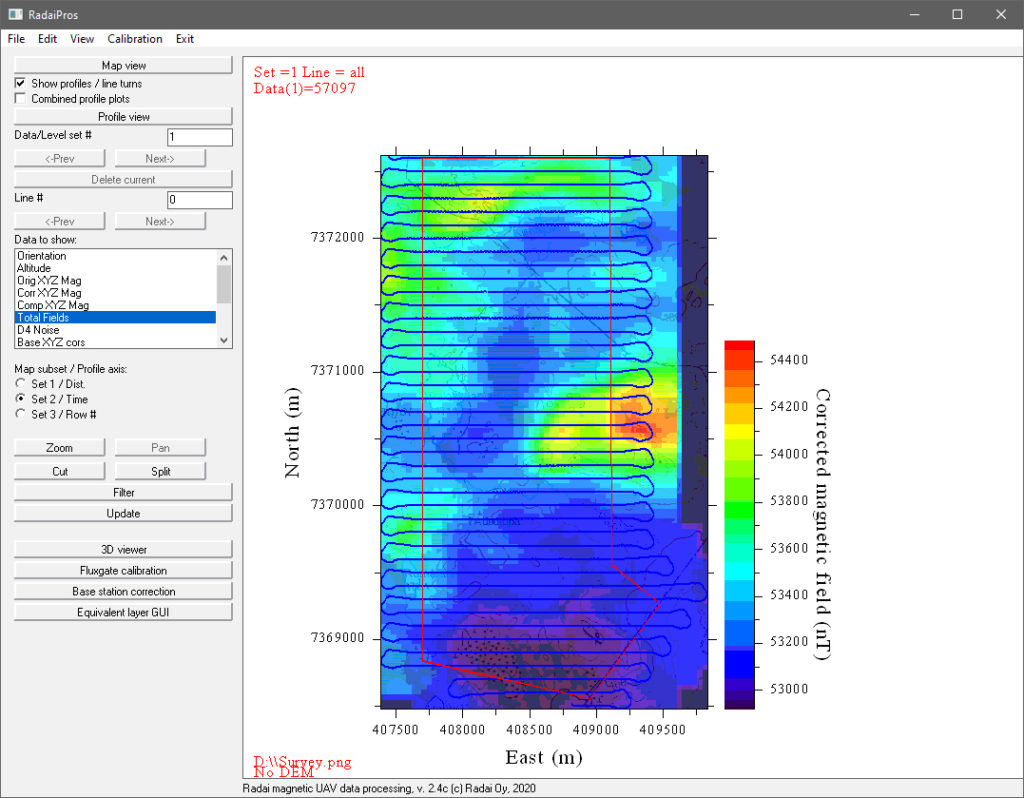
RadaiPros – magnetic UAV data processing software
RadaiPros – magnetic UAV data processing software
Basic UAV data processing:
Read raw data (CSV, TXT, BIN)
Altitude from barometric pressure and DEM (if no RTK GPS)
Map coordinates (UTM or ETRS-TM35FIN)
Fluxgate sensor calibration
Orientation correction
Data visualization as maps and profiles and in 3D
Base station correction
Data cutting, joining and filtering
Save data (UAV) and export data (XYZ)
Equivalent layer modelling (ELM):
Numerical (least squares) inversion using a single-layer susceptibility model
Total field and/or individual XYZ components
Dataset leveling and trend removal (tie-line correction)
Heading correction
Compute magnetic field on an even grid at constant altitude
Compute derivatives (1st vertical derivative, tilt and horizontal gradient)
Downward continuation and reduction to pole
Corrects flight height variations
Micro-leveling